Adding covariates to model parameters¶
In this tutorial, we will develop simple models with covariates. We have two types of covariates: continuous and categorical. The continuous covariates can be multi-dimensional (explained in another tutorial).
We start with continuous covariates called \(X\). A random parameter \(\theta\) has prior
Here, \(\alpha_X\) is the weight of the covariate \(X\).
In HBOMS, we first define the covariate \(X\) and then add \(X\) to to parameter \(\theta\)
import hboms
covs = [
hboms.Covariate("X"),
# other covariates...
]
params = [
hboms.Parameter("theta", 1.0, "random", covariates=["X"]),
# other parameters...
]
Note that by default, covariates are continuous.
We then add the list covs to the definition of the HBOMS model
hbm = hboms.HbomsModel(
params = params,
covariates = covs,
# other components...
]
Predator-prey model with a covariate¶
Let’s look at a simple concrete example in which we add a continuous covariate called \(A\) to the prey growth rate (\(a\)) in the predator-pray model. To keep it simple, we assume that all other parameters are known (and constant), and also that we just observe the prey population (\(X\)).
# import the hboms package
import hboms
# define model parameters
params = [
hboms.Parameter("a", 1.0, "random", covariates=["A"]),
hboms.Parameter("b", 1.0, "const"),
hboms.Parameter("c", 0.5, "const"),
hboms.Parameter("d", 1.0, "const"),
hboms.Parameter("x0", 1.0, "const"),
hboms.Parameter("y0", 1.0, "const"),
hboms.Parameter("sigma", 0.2, "const"),
]
# define covariates
covs = [
hboms.Covariate("A"),
]
# define the state
state = [
hboms.Variable("x"),
hboms.Variable("y"),
]
# define the IVP (ODEs and initial conditions)
odes = """
ddt_x = a*x - b*x*y;
ddt_y = b*c*x*y - d*y;
"""
init = """
x_0 = x0;
y_0 = y0;
"""
# define observations and their distributions.
obs = [
hboms.Observation("X"),
]
dists = [
hboms.StanDist("lognormal", obs_name="X", params=["log(x)", "sigma"]),
]
# now define the HBOMS model
hbm = hboms.HbomsModel(
"lv_cov_example",
params = params,
state = state,
odes = odes,
init = init,
covariates = covs,
obs = obs,
dists = dists,
)
We will now simulate some data in Python. Fit this, we sample log-normally distributed parameters \(a\), with location parameter dependent on a covariate.
import numpy as np
import scipy.stats as sts
from scipy.integrate import solve_ivp
def lv_model_sys(t, u, a, b, c, d):
x, y = u
ddt_x = a*x - b*x*y
ddt_y = b*c*x*y - d*y
return np.array([ddt_x, ddt_y])
x0, y0 = 1.0, 1.0
b, c, d = 1.0, 0.5, 1.0
sigma = 0.2
u0 = np.array([x0, y0])
R = 24
ts = np.linspace(1, 10, 20)
A = sts.norm.rvs(0, 1, size=R)
loc_a = 0.0
scale_a = 0.1
weight_A_a = 0.1
a_indiv = np.exp(sts.norm.rvs(loc=loc_a + weight_A_a * A, scale=scale_a))
def simulate_lv_model(a):
sol = solve_ivp(
lv_model_sys, y0=u0, t_span=(np.min(ts), np.max(ts)),
t_eval=ts, args=(a, b, c, d)
)
x = sol.y[0]
X = np.exp(sts.norm.rvs(loc=np.log(x), scale=sigma))
return X
Xs = [simulate_lv_model(a) for a in a_indiv]
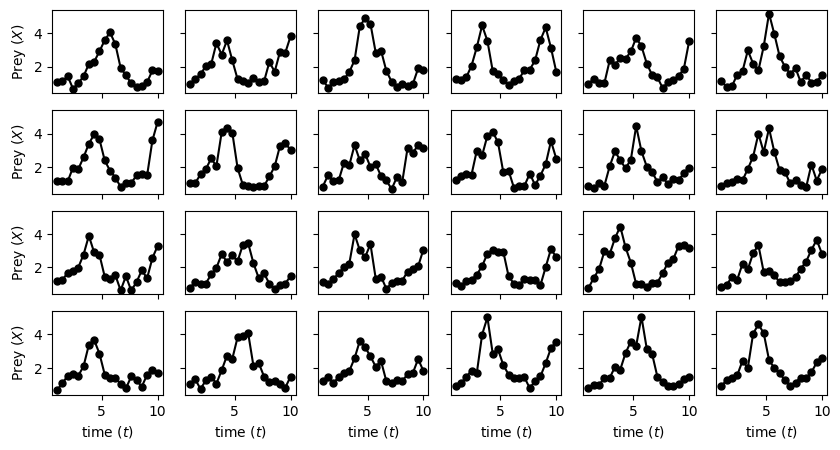
Plot the data to make sure we did not make any mistakes.
import matplotlib.pyplot as plt
fig, axs = plt.subplots(4, 6, figsize=(10,5), sharex=True, sharey=True)
for ax, X in zip(axs.flat, Xs):
ax.plot(ts, X, marker='o', color='k', markersize=5)
for ax in axs[-1,:]:
ax.set_xlabel("time ($t$)")
for ax in axs[:,0]:
ax.set_ylabel("Prey ($X$)")
Now collect data into a dictionary and check the initial parameter guess. This data dictionary has to include the covariate with one value per unit.
data_dict = {
"Time" : [ts for _ in range(R)],
"X" : Xs,
"A" : A
}
fig = hbm.init_check(data_dict)
10:56:31 - cmdstanpy - INFO - CmdStan start processing
10:56:31 - cmdstanpy - INFO - Chain [1] start processing
10:56:32 - cmdstanpy - INFO - Chain [1] done processing
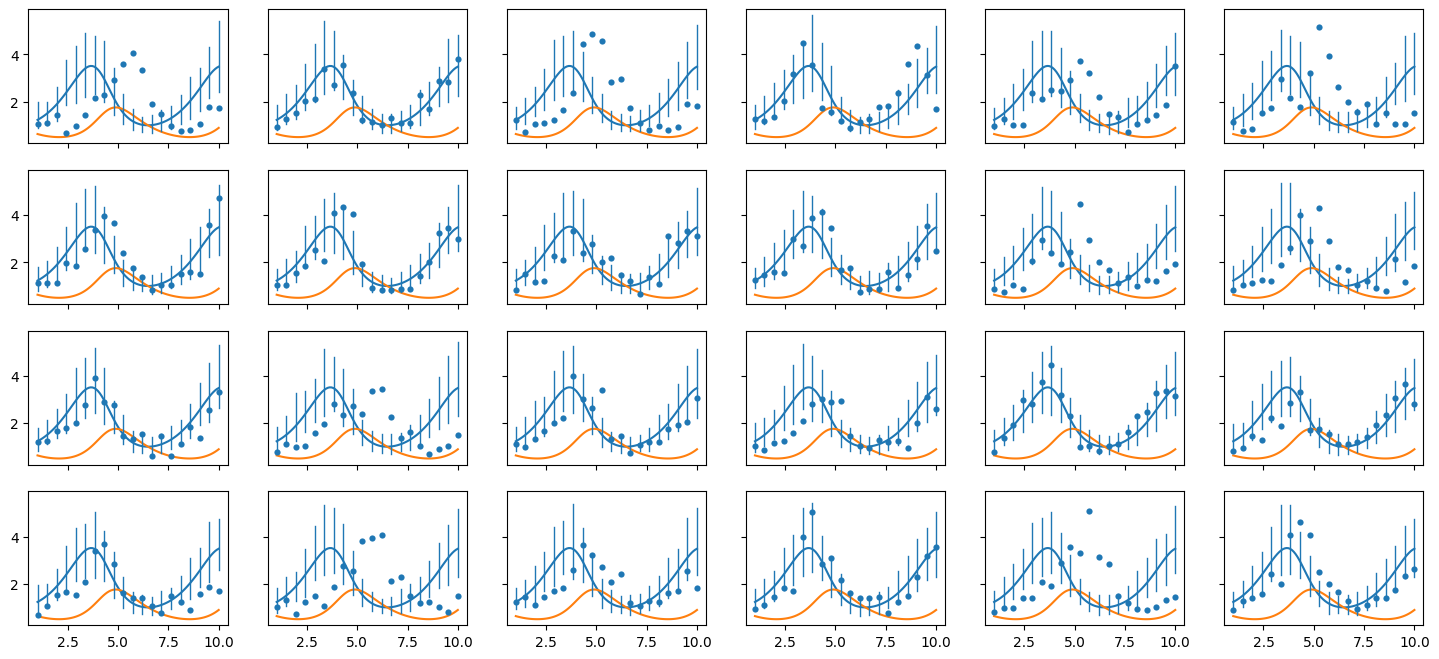
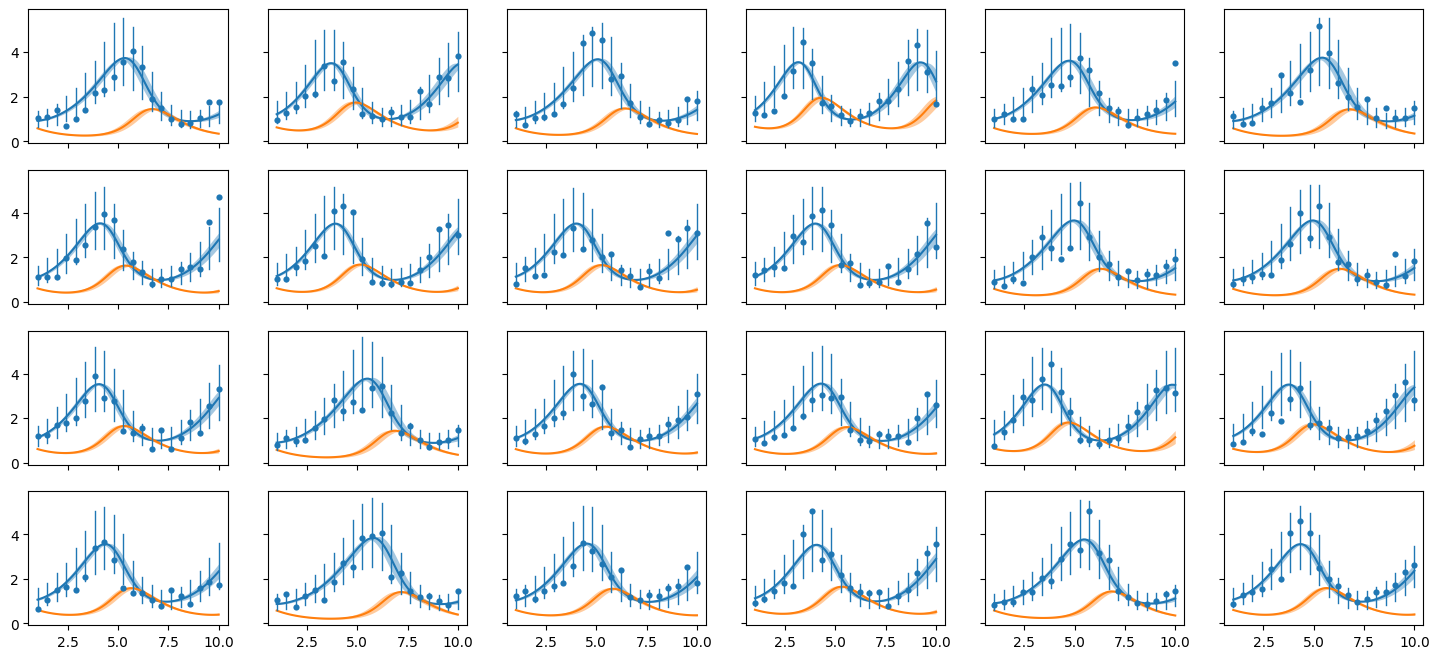
Since the initial guess looks OK, we can fit the model, and inspect the model fit
hbm.sample(
data_dict, threads_per_chain=R, chains=2, refresh=1,
step_size=0.01, iter_warmup=500, iter_sampling=500
)
fig = hbm.post_pred_check(data_dict)
10:56:37 - cmdstanpy - INFO - CmdStan start processing
10:57:12 - cmdstanpy - INFO - CmdStan done processing.
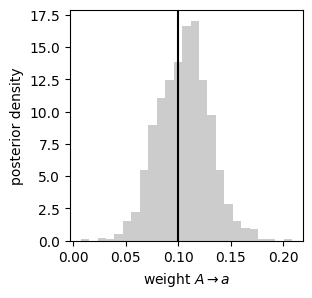
Now we can compare the estimated weight of the covariate with the ground-truth value.
In the Stan model generated by HBOMS, the weight parameter is called weight_A_a.
weight_sams = hbm.fit.weight_A_a
fig, ax = plt.subplots(1, 1, figsize=(3,3))
ax.hist(weight_sams, 25, color='0.8', label="posterior", density=True)
ax.axvline(weight_A_a, color='k', label="ground truth")
ax.set_ylabel("posterior density")
ax.set_xlabel("weight $A \\rightarrow a$");